This is an automatic translation, may be incorrect in some places. See sources and examples!
Gyver433
Library for 433 MHz radio modules and Arduino
- Support for curved Chinese modules
- Built-in CRC integrity check
- Accelerated IO algorithm for AVR Arduino
- Asynchronous receive in interrupt
- Super light liba, it will start even on a tini13
Compatibility
Compatible with all Arduino platforms (using Arduino functions)
- When connecting an interrupt on esp8266, do not forget the
IRAM_ATTRattribute
Content
Installation
- The library can be found under the name Gyver433 and installed via the library manager in:
- Arduino IDE
- Arduino IDE v2
- PlatformIO
- Download library .zip archive for manual installation:
- Unzip and put in C:\Program Files (x86)\Arduino\libraries (Windows x64)
- Unzip and put in C:\Program Files\Arduino\libraries (Windows x32)
- Unpack and put in Documents/Arduino/libraries/
- (Arduino IDE) automatic installation from .zip: Sketch/Include library/Add .ZIP library… and specify the downloaded archive
- Read more detailed instructions for installing libraries [here] (https://alexgyver.ru/arduino-first/#%D0%A3%D1%81%D1%82%D0%B0%D0%BD%D0%BE%D0%B2%D0%BA%D0%B0_%D0%B1%D0%B8%D0%B1%D0 %BB%D0%B8%D0%BE%D1%82%D0%B5%D0%BA)
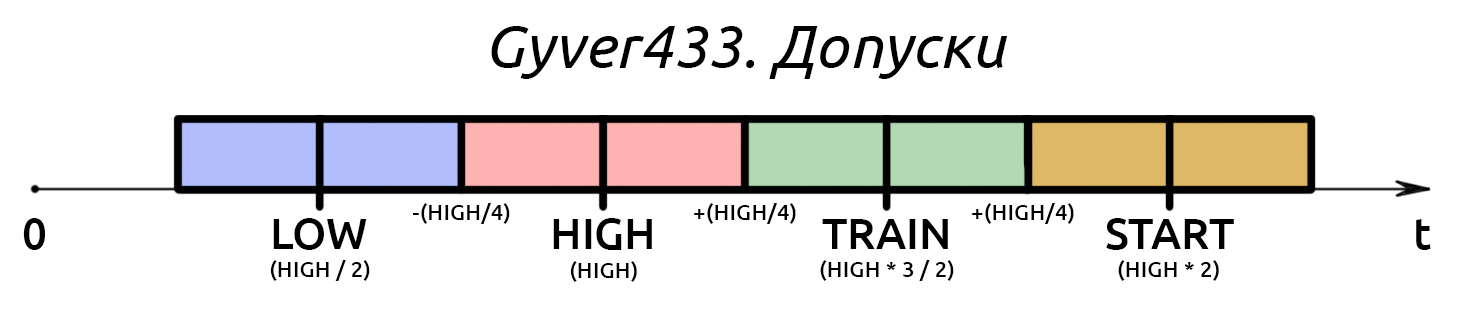
Interface
- Before sending data there is a clock pulse, TRAIN ms
- Next start impulse, START ms, LOW
- Data is encoded by pulse length
- Terminates the sending of a stop pulse, TRAIN ms



Connection
 Transmitters:
Transmitters:
- SYN115, small chip: 1.8-3.6V, max. speed 8000
- FS1000A: 3-12V, max. speed 10000
- WL102-341: 2.0-3.6V, max. speed 6000
Receivers:
- SYN480R, large chip: 3.3-5.5V
- MX-RM-5V (RF-5V): 5V
- RX470 (WL101-341): 3-5V


Initialization
// === TRANSMITTER ===
Gyver433_TX<pin> tx;
Gyver433_TX<pin, CRC> tx;
// === RECEIVER ===
Gyver433_RX<pin> rx;
Gyver433_RX<pin, buffer> rx;
Gyver433_RX<pin, buffer, CRC> rx;
// pin: digital pin
// buffer: buffer size in bytes, default 64
// CRC: data integrity check: G433_CRC8 (reliable), G433_XOR (light), G433_NOCRC (disabled). By default G433_CRC8
Usage
// ========= Gyver433_TX =========
void sendData(T&data); // send data of any type (CRC added automatically)
void write(uint8_t* buf, uint8_t size); // send an array of bytes of the specified size (no CRC added)
// ========= Gyver433_RX =========
// receive in interrupt
void tickISR(); // receive ticker to call in CHANGE interrupt
uint8_t tickISRraw(); // manual reception in CHANGE interrupt. Returns 1 (beginning of reception), 2 (byte received), 3 (end of packet)
// receive in loop
uint16_t tick(); // non-blocking receive. Returns the number of successfully received bytes
uint16_t tickWait(); // blocking receive. Returns the number of successfully received bytes
bool readData(T&data); // read the buffer into any data type (into the specified penexchange)
uint16_t getSize(); // get the size of the received data
uint16_t gotData(); // will return the number of bytes successfully received in tickISR() (see isr_rx example)
uint8_t getRSSI(); // get reception quality (percentage of successful transmissions 0.. 100)
uint8_tbuffer[]; // access to the receive buffer
uint8_t byteBuf; // access to the received byte buffer
// ============= CRC ==============
// you can use built-in functions to generate a CRC byte for manually packing packets
uint8_t G433_crc8(uint8_t *buffer, uint8_t size); // manual CRC8
uint8_t G433_crc_xor(uint8_t *buffer, uint8_t size); // manual CRC XOR
// ====== DEFINE-SETTINGS ======
// call before linking the library
#define G433_FAST // [TX] fast sync for green modules
#define G433_MEDIUM // [TX] average timing when sent to SYN480R OVER 400ms (active by default)
#define G433_SLOW // [TX] long sync when sent to SYN480R LESS than 400ms
#define G433_SPEED 1000 // [RX/TX] speed, should be the same on RX and TX, 100-10000 bps, default 2000 bps
#define G433_RSSI_COUNT 8 // [RX] number of successfully received packets for RSSI calculation (default 8)
#define G433_CUT_RSSI // [RX] remove RSSI calculation from code (save some memory)
Receiver operation without interruption
To receive data, it is enough to call the tick() method in the main loop, it polls the radio pin itself.
- If there are blocking places in the program and loop() is executed with delays - there will be data loss
- For a more reliable reception, it is recommended to call
tickWait(), it blocks the execution of the code for the duration of the reception.
Receiver operation with interrupts
It is recommended to use the CHANGE interrupt technique by calling tickISR() in it.
Then the reception will be asynchronous and will work even in the loaded program.
- If the standard interrupt pins are not enough, you can use PCINT. Manually or withLibraries https://github.com/NicoHood/PinChangeInterrupt
Examples
See examples for other examples!
Sending
#include <Gyver433.h>
Gyver433_TX<2>tx; // specified pin
void setup() {
}
chardata[] = "Hello from #xx"; // string to send
byte count = 0; // counter to send
void loop() {
// add counter to string
data[12] = (count / 10) + '0';
data[13] = (count % 10) + '0';
if (++count >= 100) count = 0;
tx.sendData(data);
delay(100);
}
Receive in interrupt
#include <Gyver433.h>
Gyver433_RX<2, 20> rx; // specified pin and buffer size
void setup() {
Serial.begin(9600);
attachInterrupt(0, isr, CHANGE); // interrupt radio pin by CHANGE
}
// spec. ticker is called in interrupt
void isr() {
rx.tickISR();
}
void loop() {
if (rx.gotData()) { // if more than 0 successfully received
Serial.write(rx.buffer, rx.size); // output
Serial.println();
}
delay(50); // simulate loaded code
}
Versions
- v1.0
- v1.1 - optimization, new interface, support for cheap blue modules, work in interrupt
- v1.2 - improving the quality of communication, optimization of work in interruption
- v1.3 - added RSSI output
- v1.4 - redesigned FastIO
- v1.4.1 - FastIO removed, CRC moved separately
- v2.0 - removed buffer for sending, removed Manchester, completely redone and optimized communication interface
- v2.0.1 - fix compiler warnings
Bugs and feedback
When you find bugs, create an Issue, or better, immediately write to the mail alex@alexgyver.ru The library is open for revision and your Pull Request's!